TopBlogNews.Ru Самые популярные новости блогов рунета
TopBlogNews.Ru Самые популярные новости блогов рунета
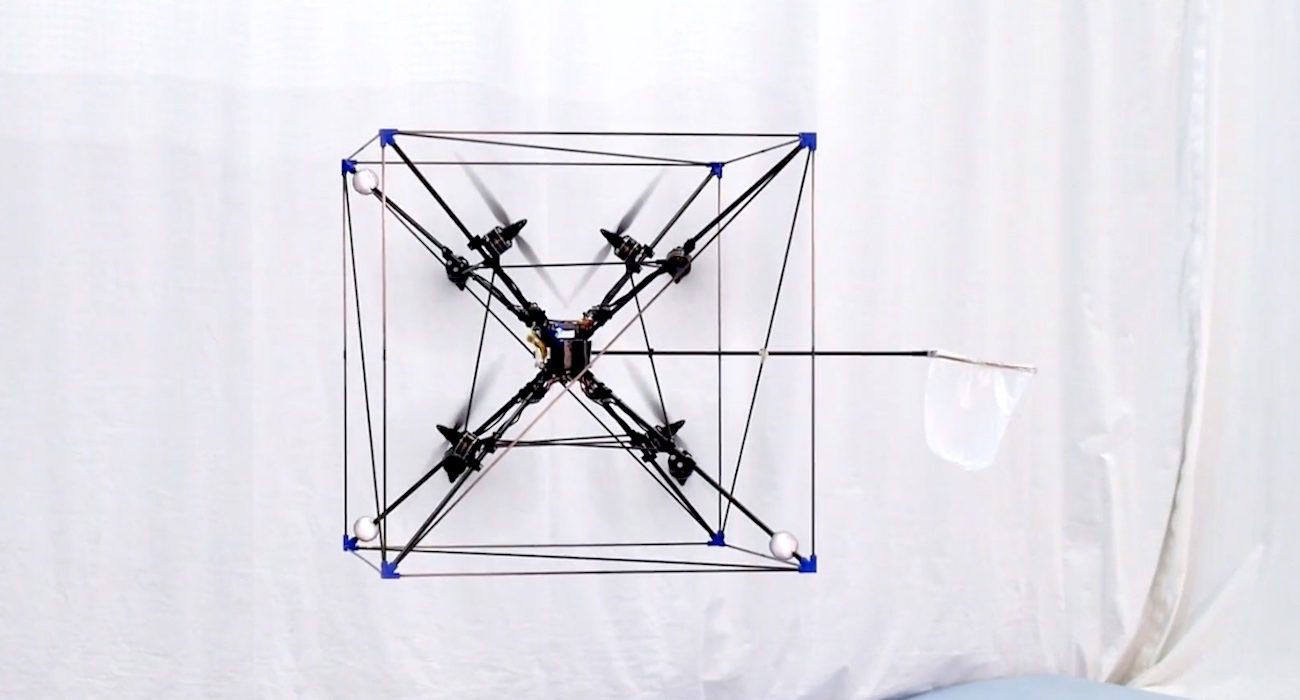
Большинство современных беспилотников имеют такую конструкцию, которая позволяет эффективно двигаться лишь в одном-двух направлениях. К примеру, привычное расположение винтов в верхней части летательного аппарата дает хорошую подъемную силу, но позволяет двигаться лишь в положении, параллельном земле, не давая «переворачиваться», что может быть большой проблемой в условиях сильного ветра. Совсем иной подход используется в беспилотнике Omnicopter, пропеллеры которого расположены таким образом, что аппарат одинаково эффективно может двигаться в любом направлении и, по сути, не имеет ни «верха», ни «низа».
Для успешного полета и выполнения команд был разработан специальный программный генератор траектории, учитывающий все параметры поведения в воздухе. За 1 секунду ПО беспилотника может выполнить расчет порядка 500 000 траекторий, выбрать оптимальную и дать соответствующие команды двигателям устройства. Такой подход делает крайне необычно выглядящий беспилотник очень маневренным. За разработку отвечают инженеры Дарио Брешианини и Рафаэлло Д’Андреа из Швейцарского федерального технологического института, что расположен в Цюрихе.
Технология швейцарских специалистов может иметь большой успех в сфере воздушных перевозок и транспортировки объектов, так как легко масштабируема и может быть применена даже в достаточно крупных летательных аппаратах. Сейчас для этих целей используются «обычные» вертолеты и многороторные беспилотники, которые имеют гораздо меньший спектр возможных движений. На данный момент слабым местом является сложное ручное управление устройством. При этом создатели нацелены на максимальное упрощение и совершенствование ПО для контроля за полетом. В данный момент ведутся разработки интеллектуальной системы управления с применением камер с высокой разрешающей способностью. Их использование даст возможность беспилотнику выполнять движения с очень высокой точностью.